Steering Mechanism and Braking
Project Goal

For this semester, we want to improve on the switching mechanism of the steering wheels because we observed excessive noise and vibrations during the switching section. We will be taking into consideration different types of damping such as active and passive damping. Within active damping, there is also semi-active damping. While the semi-active damping can only vary shock absorber according to the dynamic conditions, active damping uses the actuator that can adjust the high of the chassis independently at each side of the wheels. The actuator can be either electrical or hydraulic. In addition, the passive damping can be cheaper and easy to replaced such as rubber pads and mechanical springs. Furthermore, there can be an add-on device to help the steering wheels securely press against the surface of the track. In addition, we want to use some kind of magnet mechanism to provide extra support for the steering wheel since the adjustable mechanism lacks the passive system to secure the wheel on surface of the track. Basically, the magnets will be installed on the steering wheels and on surface of the track to help provide extra grip between steering wheels and track. Furthermore, the magnets can help overcome the friction force experienced between the support wheel and track the wheels align on the tracks.
Another goal we have for the project is to have the cabin travel at a faster speed and have the switching mechanism operate faster during the switching section. However, when approaching the switching section, it will experience an inertial force that needs to be overcome to have the cabin move at a constant speed and more stable. We try to implement faster travel actuators to make the switching mechanism operate quicker, but we also try to implement sensors to control the speed the podcar will be traveling.
Some of the previous design:

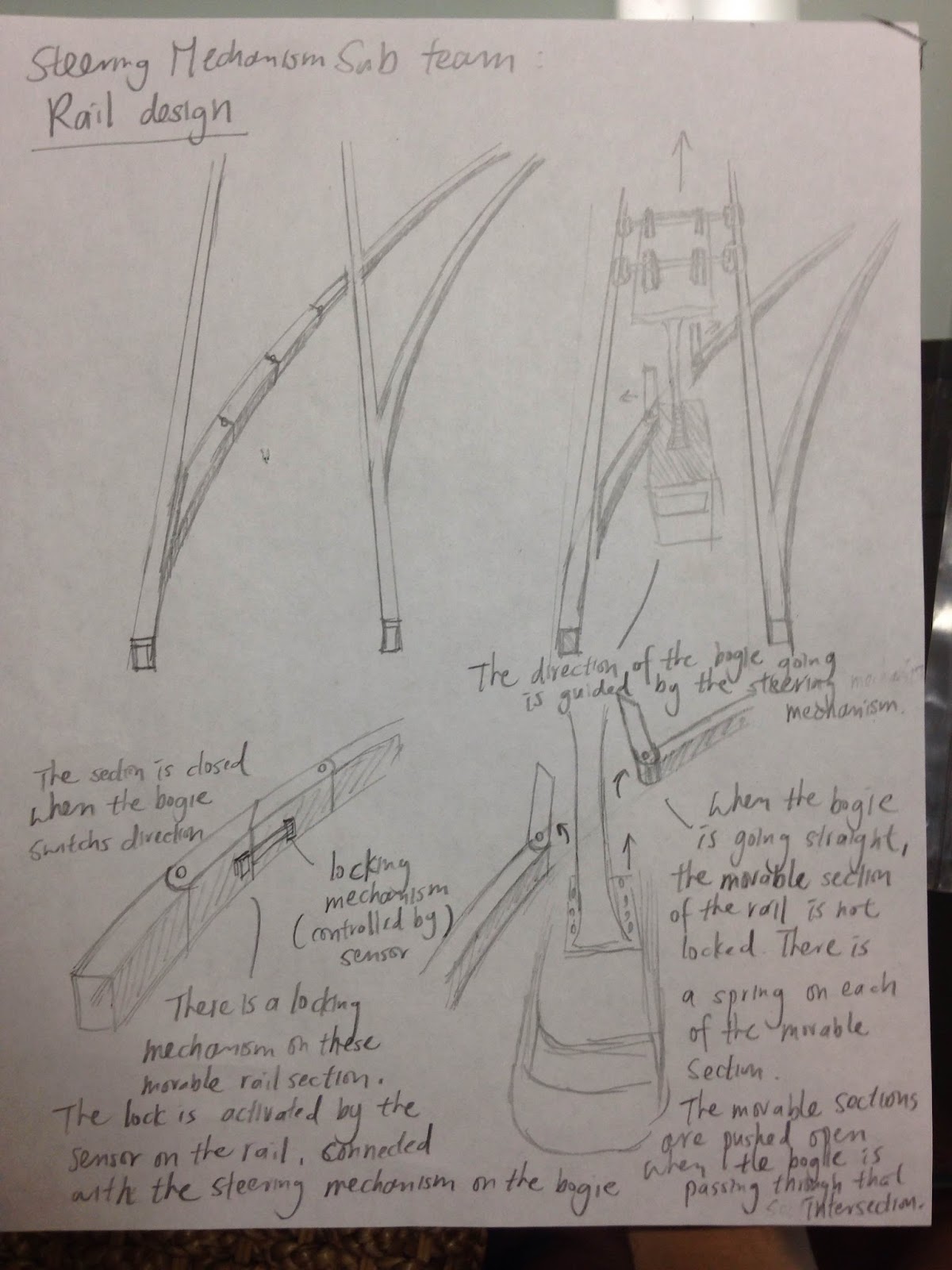
New rail design to keep the bogie supported constantly:
No comments:
Post a Comment